|
当然,这些是无人机,但是咱们今天不说这些,咱们今天说的是如何从一个航模,晋升无人机。无人机的前身,其实就是航模,
把航模增加大脑,让它拥有智能平衡,和智能自动飞行,这才是我们今天的话题。
一个简单的固定翼航模,安装上一个智能飞行控制系统,就成了最基本的无人机。说到飞控,不可能不提及APM,目前最流行的飞控,当然还有PIXHAWK,但是这不是屌丝能用的东西。首先考虑的是,你需要你的无人机用于什么样的用途?娱乐还是航拍?还是测绘?娱乐的话,买一个块飞控就可以了。其他用途的话要相应增加一些传感器,或者更专业的设备。我们现在要是的是可用于航拍的无人机。
首先得买一块APM飞控吧。淘宝上很多,价格最低160,质量应该没什么问题。我买过最低的。现在一直在用。传说雷讯的APM比较可靠,APM分为好几个版本,目前大多为1.5
1.6 1.8 1.5跟1.8差不多都是带内置罗盘的。1.6是没有内置罗盘的版本,必须要添加外置罗盘。APM的外设我们一个一个来讲。
首先是GPS,如果要实现失控返航,那么GPS必不可少。目前无人机用的GPS大多是U-BLOX的。型号大致有6m 7h
8n。目前最好的应该是8N,被人们吹捧到天上去了。不过使用了发现确实好用,空旷搜星一般都在17-21之间,定位精度HDOP1.7左右,相当不错了。7H
和6M稍微差点。购买的话建议M8N。一次到位,免得以后换来换去更花钱。
然后是电子罗盘,如果买的是1.6版本的APM。那么必须得购买罗盘,罗盘可以不必单买。因为GPS有两个选择。一个是带有罗盘的GPS。另外是没带罗盘的GPS。建议购买带罗盘的GPS。这样罗盘离开复杂的线路。更能避免罗盘收到干扰导致的失控。其他版本的APM可以通过屏蔽内置罗盘来使用外置罗盘。在主板上把罗盘的跳线帽断开就可以了。
电压电流传感器,这个还是有必要买的,作用是获取当前电池所在的电压,还有现在所使用的电流大小。用于估计剩余飞行时间。能更好的避免无人机因为没电导致炸鸡的风险。
OSD,作用是把系统状态信息叠加到视频信号上。发送回地面控制显示器。这样更能直观的观察到无人机当前的状态。
空速计,采集当前飞机机翼的空气流动速度。这个数据能让飞控更准确的操控飞机。(固定翼无人机用)
超声波测距传感器。这个的作用是无人机在低空飞行时能更好的控制高度,误差更小,(只在低空有效)
光流传感器,作用是在低空悬停的时候获得更精准的定位。(多轴无人机悬停用)
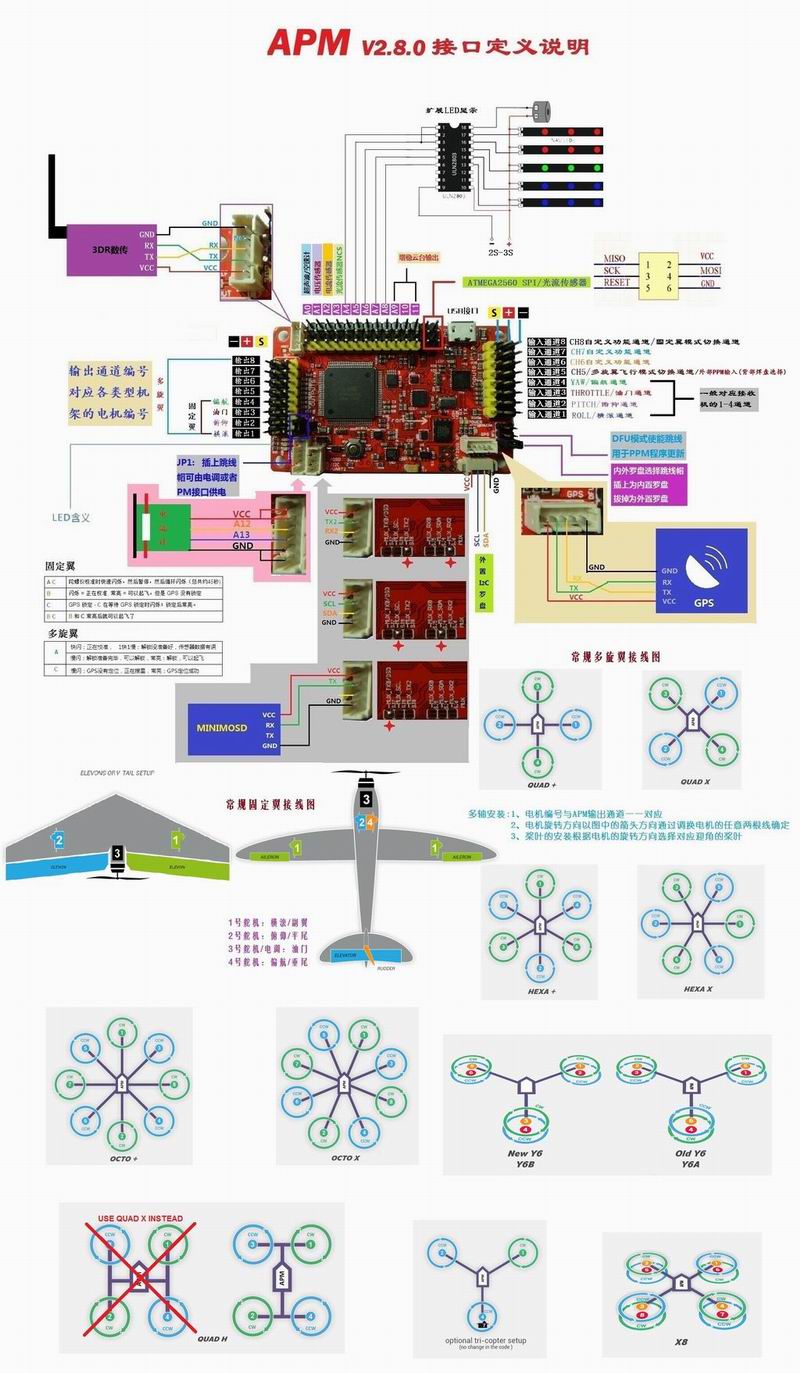
给一张APM各接口的接线图: |









 或是
或是 这样的。
这样的。